
Table of Contents
Nel nostro articolo pubblicato nel blog il 12 marzo 2020, abbiamo parlato per la prima volta del rilevamento di fughe di gas tramite veicoli per il rilevamento di gas, sottolineando le peculiarità di questo tipo di ispezione superficiale di gasdotti interrati.
All’epoca, le nuove versioni dei regolamenti DVGW G 465-1 (A) e G 465-4 (M) erano state pubblicate poco tempo prima e l’ispezione basata sui veicoli vi era stata inclusa per la prima volta e quindi dichiarata come stato dell’arte.
Il progetto di ricerca DVGW sulla valutazione di nuovi metodi di misurazione per l’ispezione delle condutture nelle reti del gas (EvaNeMeL), già menzionato nel primo post del blog, è ora concluso, quindi vorremmo concentrarci nuovamente su tale argomento.
Nuovi risultati del progetto di ricerca EvaNeMeL
Nell’ambito del progetto, sono stati studiati e valutati cinque sistemi basati su veicoli, tra cui il nostro GasCar Laser HUNTER, insieme con altre tecnologie di dispositivi.
Tutti i sistemi funzionano secondo il principio TDLAS (Tunable Diode Laser Absorption Spectroscopy – Spettroscopia ad assorbimento laser a diodi sintonizzabili) per il rilevamento del metano. Questo metodo laser ha il vantaggio di essere molto sensibile alla lunghezza d’onda di misurazione specifica del metano (λ = 1,65 μm) e di non avere sensibilità incrociate rilevanti con altri gas presenti nell’atmosfera, ad esempio i gas di scarico di altre automobili.
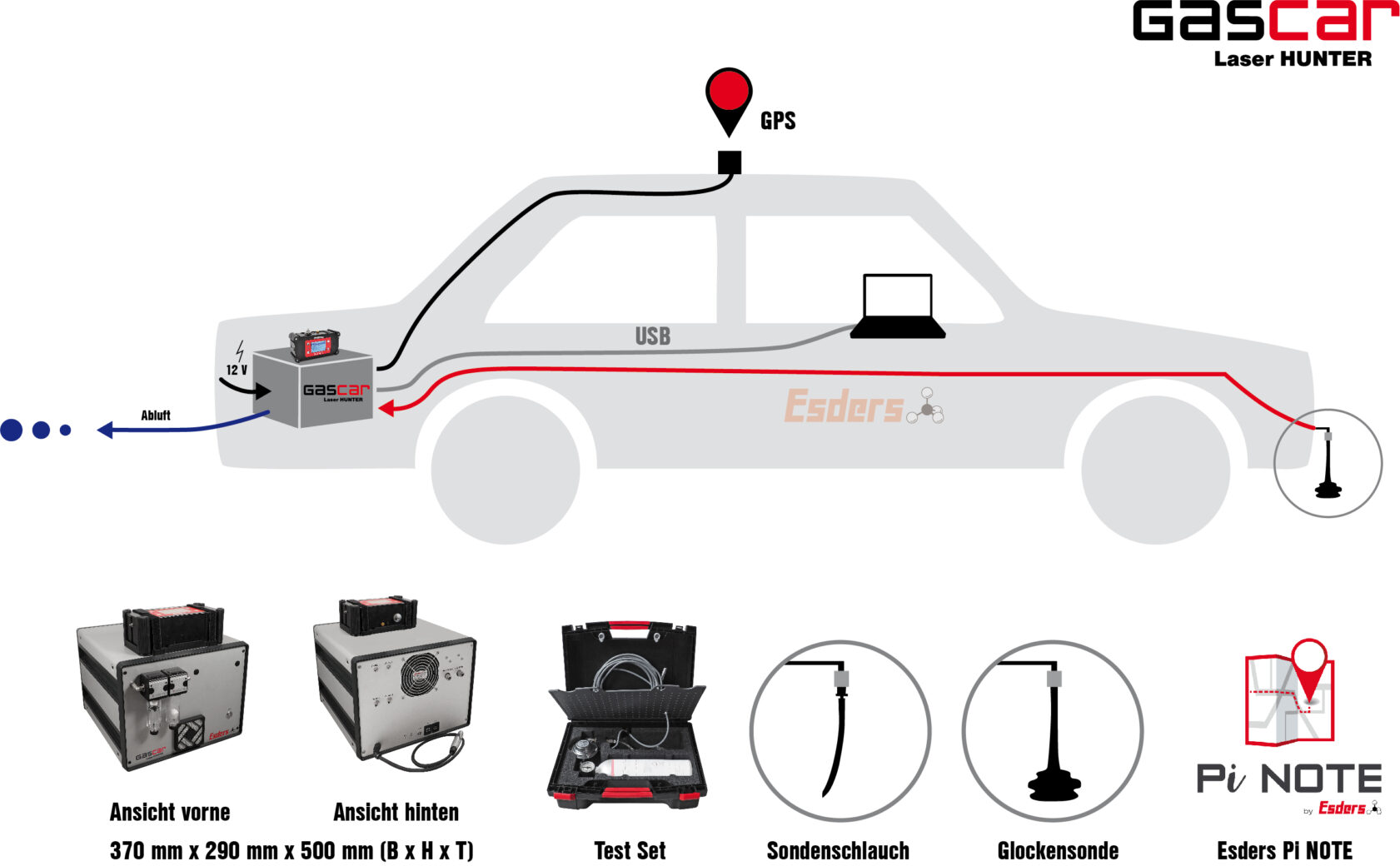
I cinque sistemi sono stati suddivisi a loro volta in due categorie. Tre dei cinque sistemi, tra cui il nostro GasCar Laser HUNTER, sono già coperti dalle attuali normative G 465 della DVGW. Funzionano con sonde montate su tutta la parte anteriore del veicolo per aspirare il flusso di gas. Quest’ultimo viene analizzato da un dispositivo, di solito ubicato nella parte posteriore del veicolo, e il risultato viene trasmesso a un notebook dotato di software specifico.
Struttura della GasCar Laser HUNTER
Gli altri due sistemi rappresentano un nuovo approccio e registrano la velocità del vento oltre al flusso di gas. Il software calcola quindi la probabile posizione di una fuga in base alla combinazione dei valori misurati. Questi sistemi non sono ancora coperti dalle attuali normative DVGW.
Tutti i sistemi sono stati confrontati in vari test di misurazione con un rilevatore di gas convenzionale, utilizzando come riferimento un dispositivo di misura portatile e una sonda a tappeto.
Inoltre, sono stati eseguiti test di laboratorio sulla sensibilità, sulla sensibilità crociata e sulla manipolazione. I risultati saranno pubblicati in un articolo specialistico su ewp all’inizio del prossimo anno.
Senza anticipare il documento tecnico, si può affermare che le preoccupazioni già menzionate nel primo post del blog sono state confermate in linea di principio. In termini pratici, ciò significa che l’uso di ispezioni della rete di condotte tramite veicoli presenta i seguenti limiti.
- Grazie alla maggiore velocità, il tempo di aspirazione del campione di gas è molto più breve. Di conseguenza, nel peggiore dei casi, le fughe possono essere “scavalcate” senza essere rilevate.
- Soprattutto nel caso di superfici sigillate, il gas spesso fuoriesce solo da un punto (ad esempio, dalla fogna). Pertanto, spesso non si assiste alla formazione di una nube di gas omogenea al di sopra del punto di dispersione, il che rende molto più difficile il rilevamento.
- I veicoli parcheggiati a bordo strada rappresentano un ostacolo per un’ispezione adeguata. I tratti della condotta che non possono essere ispezionati devono quindi essere controllati in un secondo momento, con un’altra ispezione o con metodi convenzionali.

Conclusioni
In sintesi, l’ispezione veicolare dei gasdotti interrati può essere un utile complemento all’ispezione convenzionale se vengono rispettate alcune condizioni generali.
Tra queste, ad esempio, un percorso ragionevolmente percorribile al di fuori dei centri abitati per evitare il problema delle auto in sosta e l’assenza di vento eccessivo durante l’ispezione.
Tuttavia, un vantaggio del metodo veicolare consiste nell’opportunità di effettuare l’ispezione nelle ore notturne, cosa che non è possibile o non è stata ancora fatta con l’ispezione tradizionale.
Un altro elemento positivo è la risposta generale che il progetto di ricerca fornisce alla domanda frequente sulla velocità di ispezione raccomandata. A seconda della situazione del traffico, è risultata idonea una velocità compresa tra i 15 e i 30 km/h.
I risultati del progetto di ricerca, in particolare quelli inerenti le informazioni dettagliate sulle condizioni operative (ad esempio, la velocità di ispezione) e i requisiti per la tecnologia di misurazione, devono servire come base per la revisione delle norme esistenti G 465-1 (A) e G 465-4 (M).
Tuttavia, una nuova versione di questi due regolamenti non è prevista prima del prossimo anno, forse nemmeno prima del 2024.